Het volgende is een fragment uit mijn nieuwe boek, "Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos", dat morgen wordt vrijgegeven, dec. Het boek is een kijkje in de binnenkant van verschillende NASA-robotmissies, en dit fragment is deel 1 van 3 dat hier zal worden geplaatst op Space Magazine, van Hoofdstuk 2, "Roving Mars with Curiosity." Het boek is te bestellen op Amazon en Barnes & Noble.
Zeven minuten terreur
Het duurt ongeveer zeven minuten voordat een ruimtevaartuig van gemiddelde grootte - zoals een rover of een robotlander - door de atmosfeer van Mars afdaalt en het oppervlak van de planeet bereikt. Tijdens die korte minuten moet het ruimtevaartuig vertragen van zijn razendsnelle inkomende snelheid van ongeveer 13.000 mph (20.900 km / u) om met slechts 2 mph (3 km / u) of minder te landen.
Dit vereist dat een Rube Goldberg-achtige reeks evenementen in perfecte volgorde plaatsvindt, met nauwkeurige choreografie en timing. En het moet allemaal automatisch via de computer gebeuren, zonder input van iemand op aarde. Er is geen manier om het ruimtevaartuig op afstand van onze planeet te leiden, zo'n 250 miljoen kilometer verderop. Op die afstand duurt de vertragingstijd van het radiosignaal van de aarde tot Mars meer dan 13 minuten. Daarom, tegen de tijd dat de afdaling van zeven minuten is afgelopen, zijn al die gebeurtenissen gebeurd - of niet gebeurd - en weet niemand op aarde welke. Of je ruimtevaartuig zit prachtig op het oppervlak van Mars of ligt in een neergestorte hoop.

Daarom noemen wetenschappers en ingenieurs van de missies naar Mars het 'Seven Minutes of Terror'.
En met de missie van het Mars Science Laboratory (MSL), die in november 2011 vanaf de aarde werd gelanceerd, nam de angst en schroom over wat officieel de 'Entry, Descent and Landing' (EDL) wordt genoemd, exponentieel toe. MSL beschikt over een 1-ton (900 kg), 6-wielige rover genaamd Curiosity, en deze rover zou een gloednieuw, niet-getest landingssysteem gebruiken.
Tot nu toe hebben alle Mars-landers en -rovers - in volgorde - een door een raket geleide ingang, een hitteschild gebruikt om het voertuig te beschermen en te vertragen, en vervolgens een parachute, gevolgd door stuwraketten om het voertuig nog meer te vertragen. Nieuwsgierigheid zou deze reeks ook gebruiken. Een laatste, cruciaal onderdeel was echter een van de meest complexe landingsinstrumenten die ooit zijn gevlogen.

Nagesynchroniseerd als de "Sky Crane", zou een zwevende rakettafel de rover laten zakken op 66 ft. (20 meter) kabels van Vectran-touw als een abseilende bergbeklimmer, met de rover zacht landend direct op zijn wielen. Dit moest allemaal binnen een paar seconden voltooid zijn, en toen de boordcomputer een touchdown voelde, zou pyrotechniek de touwen doorsnijden en zou de zwevende afdaling met vol gas wegvliegen om ver van Curiosity neer te storten.
Deze rover, die de zaken nog ingewikkelder zou maken, zou de meest precieze off-world landing ooit proberen, in een krater naast een berg ter hoogte van Mount Rainier.
Een groot deel van de onzekerheid was dat ingenieurs nooit het hele landingssysteem achter elkaar konden testen. En niets kan de meedogenloze atmosferische omstandigheden en lichtere zwaartekracht op Mars simuleren, behalve op Mars zelf. Omdat de echte landing de eerste keer zou zijn dat de volledige Sky Crane zou worden gebruikt, waren er vragen: wat als de kabels niet van elkaar zouden scheiden? Wat als de afdalingsfase vlak bovenop de rover bleef dalen?
Als de Sky Crane niet zou werken, zou het game-over zijn voor een missie die al zoveel had overwonnen: technische problemen, vertragingen, kostenoverschrijdingen en de woede van critici die zeiden dat deze Mars-rover van $ 2,5 miljard geld aan het bloeden was de rest van het planetaire verkenningsprogramma van NASA.

Missies naar Mars
Met zijn rode gloed aan de nachtelijke hemel wenkt Mars al eeuwenlang skywatchers. Als de planeet die zich het dichtst bij de aarde bevindt en die potentieel biedt voor toekomstige menselijke missies of kolonisatie, was het van groot belang in het tijdperk van ruimteverkenning. Tot op heden zijn er meer dan 40 robotmissies gelanceerd op de Rode Planeet ... of beter gezegd, meer dan 40 missies geprobeerd.
Met inbegrip van alle Amerikaanse, Europese, Sovjet / Russische en Japanse inspanningen is meer dan de helft van de Mars-missies mislukt, hetzij vanwege een lanceringsramp, een storing onderweg naar Mars, een mislukte poging om in een baan om de aarde te glippen, of een catastrofale landing. Hoewel recente missies meer succes hebben gehad dan onze eerste baanbrekende pogingen om Mars in situ (op locatie) te verkennen, maken ruimtewetenschappers en ingenieurs maar een grapje wanneer ze het hebben over zaken als een 'Grote Galactische Ghoul' of de 'Marsvloek' die de missies.

Maar er zijn ook geweldige successen behaald. Vroege missies in de jaren zestig en zeventig, zoals Mariner-orbiters en Viking-landers, lieten ons een opvallend mooie, hoewel kale en rotsachtige wereld zien, waardoor alle hoop op 'kleine groene mannen' als onze planetaire buren werd verstoord. Maar latere missies brachten een tweedeling aan het licht: prachtige verlatenheid gecombineerd met verleidelijke hints van water uit het verleden - of misschien zelfs van het heden - en wereldwijde activiteit.
Tegenwoordig is het oppervlak van Mars koud en droog en de fluweeldunne atmosfeer beschermt de planeet niet tegen bombardementen van straling van de zon. Maar indicaties zijn dat de omstandigheden op Mars niet altijd zo waren. Zichtbaar vanuit de ruimte zijn kanalen en ingewikkelde vallei-systemen die lijken te zijn gesneden door stromend water.
Decennia lang hebben planetaire wetenschappers gedebatteerd of deze kenmerken zich hebben gevormd tijdens korte, natte periodes veroorzaakt door catastrofale gebeurtenissen zoals een enorme asteroïde-aanval of plotselinge klimaatrampen, of dat ze zich gedurende miljoenen jaren hebben gevormd toen Mars mogelijk continu warm en nat was. Veel van de bewijzen tot nu toe zijn dubbelzinnig; deze kenmerken hadden hoe dan ook kunnen zijn gevormd. Maar miljarden jaren geleden, als er rivieren en oceanen waren, net als op aarde, had het leven misschien stand gehouden.

The Rovers
De Curiosity-rover is het vierde mobiele ruimtevaartuig dat NASA naar het oppervlak van Mars heeft gestuurd. De eerste was een rover van 23 pond (10,6 kg), Sojourner genaamd, die op 4 juli 1997 op een met rotsen bedekte Marsvlakte landde. Ongeveer zo groot als een magnetron, was de 65 cm lange Sojourner nooit doorkruist meer dan 40 voet afstand van de lander en het basisstation. De rover en lander vormden samen de Pathfinder-missie, die naar verwachting ongeveer een week zou duren. In plaats daarvan duurde het bijna drie maanden en het duo leverde 2,6 gigabit aan gegevens op, waarbij meer dan 16.500 afbeeldingen van de lander en 550 afbeeldingen van de rover werden gemaakt, evenals chemische metingen van rotsen en grond en het bestuderen van de atmosfeer en het weer van Mars. Het identificeerde sporen van een warmer, natter verleden voor Mars.

De missie vond plaats toen het internet net aan populariteit won en NASA besloot om foto's van de rover online te plaatsen zodra ze naar de aarde werden gestraald. Dit werd uiteindelijk een van de grootste evenementen in de geschiedenis van het jonge internet, waarbij de website van NASA (en mirror-sites opgezet voor de grote vraag) in de eerste 20 dagen na de landing meer dan 430 miljoen hits ontving.
Ook Pathfinder gebruikte een ongebruikelijk landingssysteem. In plaats van stuwraketten te gebruiken om het oppervlak te raken, bedachten ingenieurs een systeem van gigantische airbags om het ruimtevaartuig te omringen en te beschermen. Na gebruik te hebben gemaakt van het conventionele systeem van een door een raket geleide toegang, hitteschild, parachutes en stuwraketten, werden de airbags opgeblazen en werd de gecoconeerde lander van 30 meter boven de grond gedropt. Pathfinder stuiterde meerdere keren over Mars 'oppervlaktetijden als een gigantische strandbal en kwam uiteindelijk tot stilstand, de airbags liepen leeg en de lander ging open om de rover te laten verschijnen.
Dat klinkt misschien als een gekke landingsstrategie, maar het werkte zo goed dat NASA besloot om grotere versies van de airbags te gebruiken voor de volgende rovermissie: twee identieke rovers genaamd Spirit en Opportunity. De Mars Exploration Rovers (MER) zijn ongeveer zo groot als een rijdende grasmaaier, 1,6 meter lang en wegen ongeveer 185 kg. Spirit landde op 4 januari 2004 met succes in de buurt van de evenaar van Mars en drie weken later stuiterde Opportunity op de andere kant van de planeet. Het doel van MER was om bewijs te vinden van water in het verleden op Mars, en beide rovers wonnen de jackpot. Onder veel bevindingen vond Opportunity oude rotsformaties die werden gevormd in stromend water en Spirit vond ongebruikelijke bloemkoolvormige silicastenen die wetenschappers nog steeds bestuderen, maar ze kunnen aanwijzingen geven voor het potentiële oude leven op Mars.

Ongelooflijk genoeg is de Opportunity-rover op dit moment (2016) nog steeds actief, hij rijdt meer dan een marathon (26 mijl / 42 km) en blijft Mars verkennen bij een grote krater genaamd Endeavour. Spirit bezweek echter tijdens de koude Martiaanse winter in 2010 aan krachtverlies door vast te zitten in een zandvanger. De twee rovers overleefden hun verwachte levensduur van 90 dagen ver.
Op de een of andere manier ontwikkelden de rovers elk een eigen ‘persoonlijkheid’ - of misschien een betere manier om het te formuleren: mensen toegewezen persoonlijkheden voor de robots. Spirit was een probleemkind en drama-koningin, maar moest voor elke ontdekking strijden; Opportunity, een bevoorrechte jongere zus en sterrenartiest, omdat nieuwe bevindingen haar gemakkelijk leken te komen. Spirit and Opportunity waren niet ontworpen om schattig te zijn, maar de charmante rovers spraken de verbeelding van zowel kinderen als ervaren ruimteveteranen. MER-projectmanager John Callas noemde de twin rovers ooit 'de schattigste dingen in het zonnestelsel'. Terwijl de langlevende, moedige rovers gevaren en gevaren overwonnen, stuurden ze elke dag ansichtkaarten vanaf Mars. En de aardbewoners waren er dol op.
Nieuwsgierigheid
Hoewel het al lang op onze takenlijst staat, hebben we nog niet helemaal uitgezocht hoe we mensen naar Mars kunnen sturen. We hebben grotere en geavanceerdere raketten en ruimtevaartuigen nodig, betere technologie voor zaken als levensondersteuning en het verbouwen van ons eigen voedsel, en we hebben echt niet het vermogen om de zeer grote ladingen te landen die nodig zijn om een menselijke nederzetting op Mars te creëren.
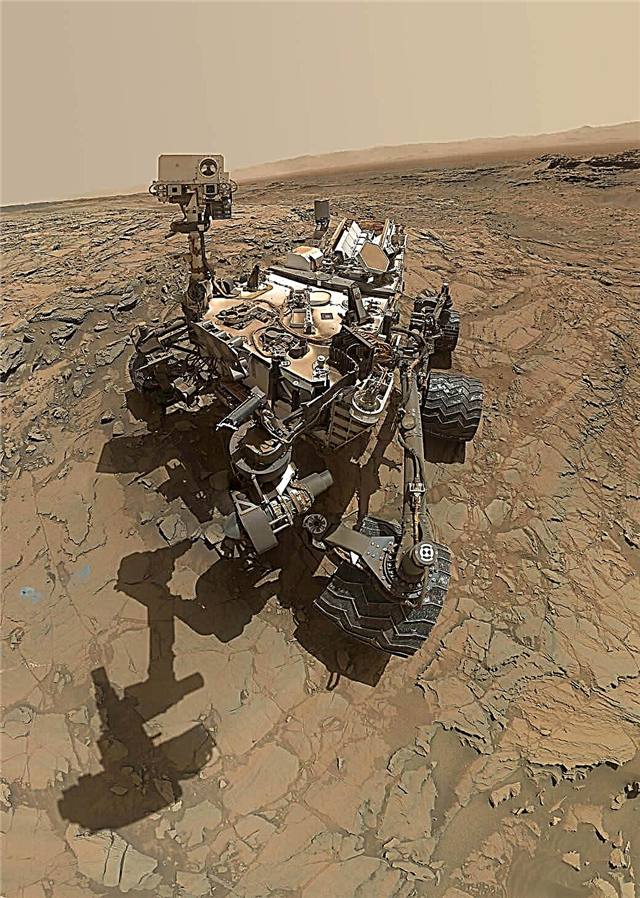
Maar ondertussen - terwijl we dat allemaal proberen uit te zoeken - hebben we het robotische equivalent van een menselijke geoloog naar de Rode Planeet gestuurd. De Curiosity-rover ter grootte van een auto is bewapend met een reeks van zeventien camera's, een boormachine, een schep, een handlens en zelfs een laser. Deze tools lijken op apparatuur die geologen gebruiken om rotsen en mineralen op aarde te bestuderen. Bovendien bootst deze rover menselijke activiteit na door bergbeklimmen, eten (figuurlijk gesproken), zijn (robot) arm buigen en selfies nemen.

Deze zwervende robotgeoloog is ook een mobiel chemielaboratorium. In totaal helpen tien instrumenten van de rover bij het zoeken naar organische koolstof die zou kunnen wijzen op de grondstof die het leven nodig heeft, en 'ruiken' de lucht van Mars, in een poging te ruiken of er gassen zoals methaan - wat een teken van leven zou kunnen zijn - aanwezig zijn. De robotarm van Curiosity heeft een Zwitsers zakmes van gadgets: een vergrootglasachtige camera, een spectrometer om chemische elementen te meten en een boor om in rotsen te boren en monsters te voeren naar de laboratoria SAM (Sample Analysis at Mars) en) en CheMin (Chemie en mineralogie). De ChemCam-laser kan gesteente verdampen tot op 7 meter afstand en de mineralen identificeren uit het spectrum van het licht dat wordt uitgestraald door het gestraalde gesteente. Een weerstation en stralingsmonitor ronden de apparaten aan boord af.
Met deze camera's en instrumenten wordt de rover de ogen en handen van een internationaal team van ongeveer 500 aardgebonden wetenschappers.
Terwijl de vorige Mars-rovers zonnepanelen gebruikten om zonlicht op te vangen voor energie, gebruikt Curiosity een RTG zoals New Horizons. De elektriciteit die door de RTG wordt opgewekt, voedt herhaaldelijk oplaadbare lithium-ionbatterijen en de warmte van de RTG wordt ook naar het roverchassis geleid om de interne elektronica warm te houden.
Met de grootte en het gewicht van Curiosity was het airbag-landingssysteem dat door de vorige rovers werd gebruikt, uitgesloten. Zoals NASA-ingenieur Rob Manning uitlegde: "Zoiets groots kun je niet stuiteren." De Sky Crane is een gedurfde oplossing.
De missie van Curiosity: uitzoeken hoe Mars in miljarden jaren is geëvolueerd en bepalen of het ooit - of zelfs nu - in staat was om het microbiële leven te ondersteunen.
Curiosity's doel voor verkenning: een 3,4 mijl (5,5 km) hoge berg bergwetenschappers noemen Mt. Sharp (formeel bekend als Aeolis Mons) in het midden van Gale Crater, een impactbekken met een diameter van 96 mijl (155 km).
Gale werd gekozen uit 60 kandidaat-sites. Gegevens van ruimtevaartuigen in een baan om de aarde hebben vastgesteld dat de berg tientallen lagen sedimentair gesteente heeft, misschien gebouwd over miljoenen jaren. Deze lagen zouden het verhaal kunnen vertellen van de geologische en klimaatgeschiedenis van Mars. Bovendien lijken zowel de berg als de krater kanalen en andere kenmerken te hebben die eruit zien alsof ze zijn gesneden door stromend water.
Het plan: MSL zou in een lager, vlakker deel van de krater landen en voorzichtig zijn weg omhoog naar de berg banen, elke laag bestuderen, in wezen een rondleiding door de tijdperken van de geologische geschiedenis van Mars.
Het moeilijkste zou zijn om daar te komen. En het MSL-team had maar één kans om het goed te doen.
Landing Night
De landing van Curiosity op 5 augustus 2012 was een van de meest verwachte gebeurtenissen in de ruimteverkenning in de recente geschiedenis. Miljoenen mensen keken naar gebeurtenissen die zich online en op tv afspeelden, met feeds van sociale media vol met updates. De feed van NASA TV van de missiecontrole van JPL werd live uitgezonden op de schermen op het Time Square in New York en op locaties over de hele wereld waar ‘landingsfeesten’ plaatsvinden.
Maar het epicentrum van actie was bij JPL, waar honderden ingenieurs, wetenschappers en NASA-functionarissen bijeenkwamen in de Space Flight Operations Facility van JPL. Het EDL-team - allemaal gekleed in bijpassende lichtblauwe poloshirts - bewaakte computerconsoles bij mission control.
Twee leden van het team vielen op: EDL-teamleider Adam Steltzner - die zijn haar draagt in een Elvis-achtige pompadour - liep heen en weer tussen de rijen consoles. Flight Director Bobak Ferdowski droeg sport en een uitgebreide sterren en strepen Mohawk. Het is duidelijk dat exotische kapsels in de eenentwintigste eeuw de zwarte bril en zakbeschermers uit de jaren 60 voor NASA-ingenieurs hebben vervangen.

Ten tijde van de landing was Ashwin Vasavada een van de langst dienende wetenschappers van het missieteam, nadat hij in 2004 bij MSL was aangesteld als plaatsvervangend projectwetenschapper toen de rover in aanbouw was. Destijds werkte een groot deel van Vasavada's werk met de instrumentteams om de doelstellingen van hun instrumenten af te ronden, en hield toezicht op technische teams om de instrumenten te helpen ontwikkelen en ze te integreren met de rover.
Elk van de tien geselecteerde instrumenten bracht een team van wetenschappers met zich mee, dus met ingenieurs, extra personeel en studenten waren er honderden mensen die de rover klaar maakten voor lancering. Vasavada hielp bij het coördineren van elke beslissing en wijziging die de uiteindelijke wetenschap op Mars zou kunnen beïnvloeden. Tijdens de landing kon hij echter alleen maar kijken.
'Ik was in de kamer naast de controlekamer die op tv werd vertoond', zei Vasavada. "Voor de landing kon ik niets anders doen dan de afgelopen acht jaar van mijn leven te beseffen en mijn hele toekomst reed allemaal op die zeven minuten EDL."
Bovendien leidde het feit dat niemand het echte lot van de rover tot 13 minuten daarna zou kennen vanwege de vertragingstijd van de radio tot een gevoel van hulpeloosheid voor iedereen bij JPL.
"Hoewel ik op een stoel zat," voegde Vasavada eraan toe, "denk ik dat ik mentaal in de foetushouding was opgerold."
Toen Curiosity dichter bij Mars kwam, kwamen drie andere ervaren ruimtevaartuigen die al om de planeet draaiden, in positie om de nieuwkomer MSL in de gaten te kunnen houden terwijl het informatie over zijn status doorgaf. In eerste instantie communiceerde MSL rechtstreeks met de Deep Space Network (DSN) -antennes op aarde.
Om telemetrie van het ruimtevaartuig tijdens EDL zo gestroomlijnd mogelijk te maken, zond Curiosity 128 eenvoudige maar duidelijke tonen uit die aangeven wanneer stappen in het landingsproces waren geactiveerd. Allen Chen, een ingenieur in de controlekamer, kondigde ze elk aan zoals ze kwamen: één geluid gaf aan dat het ruimtevaartuig de atmosfeer van Mars binnendrong; een ander signaal gaf aan dat de stuwraketten schoten en het ruimtevaartuig naar de Gale-krater leidden. Voorlopig klappen en glimlachen kwam van het team van Mission Control in de vroege tonen, met toenemende emoties naarmate het ruimtevaartuig steeds dichter naar de oppervlakte kwam.
Halverwege de afdaling ging MSL onder de horizon van Mars, waardoor het niet meer in verbinding stond met de aarde. Maar de drie orbiters - Mars Odyssey, Mars Reconnaissance Orbiter en Mars Express - waren klaar om gegevens vast te leggen, op te nemen en door te sturen naar de DSN.

Naadloos bleven de tonen naar de aarde komen terwijl elke stap van de landing feilloos doorging. De parachute ingezet. Het hitteschild viel weg. Een toon betekende het stadium van de afdaling met de rover die de parachute losliet, een andere duidde op een gemotoriseerde vlucht en afdaling naar het oppervlak. Een andere toon betekende dat de Sky Crane de rover naar de oppervlakte liet zakken.
Er klonk een toon die aangaf dat de wielen van Curiosity het oppervlak raakten, maar zelfs dat betekende niet dat het succes was. Het team moest ervoor zorgen dat de Sky Crane flyaway-manoeuvre werkte.
Toen kwam de toon waarop ze wachtten: 'Touchdown bevestigd', juichte Chen toe. "We zijn veilig op Mars!"
Pandemonium en vreugde barstten los in de missiecontrole van JPL, op de sites van de landingspartijen en op sociale media. Het leek erop dat de wereld op dat moment samen werd gevierd. Kostenoverschrijdingen, vertragingen, alle negatieve dingen die ooit over de MSL-missie werden gezegd, leken te verdwijnen met de triomf van de landing.
'Welkom op Mars!' de directeur van het Jet Propulsion Laboratory, Charles Elachi, zei tijdens een persconferentie na de dramatische landing: “Vanavond zijn we geland, morgen beginnen we Mars te verkennen. Onze nieuwsgierigheid kent geen grenzen. ”

'De zeven minuten gingen eigenlijk heel snel', zei Vasavada. 'Het was voorbij voordat we het wisten. Daarna sprong iedereen op en neer, ook al waren de meesten van ons nog bezig met verwerken dat het zo goed ging. ”
Dat de landing zo goed - inderdaad perfect - verliep, heeft misschien een deel van het team bij JPL geschokt. Hoewel ze de landing van Curiosity verschillende keren hadden geoefend, merkwaardig genoeg, konden ze het voertuig nooit landen in hun simulaties.
'We hebben geprobeerd het heel nauwkeurig te repeteren', zei Vasavada, 'zodat alles synchroon liep - zowel de telemetrie die we hadden gesimuleerd die van het ruimtevaartuig zou komen, als realtime animaties die waren gemaakt. Het was een vrij complexe zaak, maar het werkte nooit echt. Dus de echte, daadwerkelijke landing was de eerste keer dat alles goed werkte. ”
Curiosity was geprogrammeerd om direct foto's te maken van de omgeving. Binnen twee minuten na de landing werden de eerste beelden naar de aarde gestraald en verschenen op de kijkschermen bij JPL.
"We hadden de orbiters getimed om tijdens de landing over te vliegen, maar we wisten niet zeker of hun relaislink lang genoeg zou duren om de eerste foto's neer te halen," zei Vasavada. 'Die eerste foto's waren vrij slecht, omdat de beschermkappen nog op de camera's zaten en de stuwraketten veel stof op de kappen hadden geschopt. We konden het niet echt goed zien, maar we sprongen toch op en neer omdat dit foto's van Mars waren. "
Verbazingwekkend genoeg toonde een van de eerste foto's precies wat de rover was gestuurd om te studeren.
'We waren geland met de camera's die in feite direct op Mt. Scherp, 'zei Vasavada hoofdschuddend. “In het HazCam-beeld (gevarencamera), precies tussen de wielen, hadden we deze prachtige foto. Daar was de berg. Het was als een voorproefje van de hele missie, recht voor ons. '

Morgen: deel 2 van "Roving Mars With Curiosity", met ‘Living on Mars Time’ en ‘Discoveries’
"Incredible Stories From Space: A Behind-the-Scenes Look to the Missions Changing Our View of the Cosmos" wordt uitgegeven door Page Street Publishing, een dochteronderneming van Macmillan.