Als je de HiRISE-afbeeldingen met hoge resolutie van de Mars Reconnaissance Orbiter hebt bekeken of de kans hebt gehad om de nieuwe Google Mars te verkennen, weet je dat Mars vol zit met kraters, bergen, geulen en allerlei interessante - en gevaarlijke - terreinen . Gebieden zoals deze met gelaagde afzettingen, sedimenten, breuken en breuken zijn slechts het soort plaatsen om te zoeken naar de bronnen van methaan die op Mars wordt geproduceerd. Maar het is veel te riskant om onze huidige stijl van rovers, inclusief het Mars Science Laboratory (MSL) van 2011, naar verraderlijk terrein te sturen. Maar ingenieurs van JPL hebben, samen met studenten van het California Institute of Technology, een veelzijdige robot met een lage massa ontworpen en getest die kan worden toegevoegd aan grotere rovers zoals MSL die van kliffen kunnen abseilen, behendig over steile en rotsachtige terreinen kunnen reizen en verkennen diepe kraters.
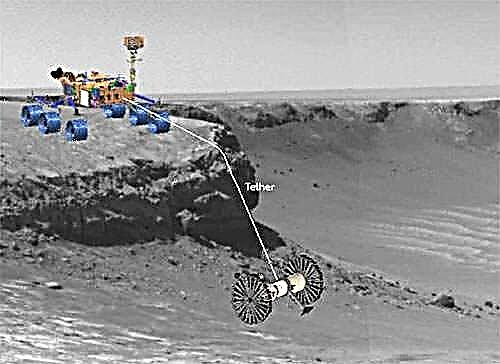
Deze prototype-rover, Axel genaamd, kan toekomstige robotachtige ruimtevaartuigen helpen om vreemde werelden zoals Mars beter te verkennen en te onderzoeken. Op aarde kan Axel helpen bij zoek- en reddingsoperaties.
"Axel vergroot ons vermogen om terreinen te verkennen die we in het verleden niet hebben kunnen verkennen, zoals diepe kraters met verticaal hellende voorgebergten", zegt Axel's hoofdonderzoeker, Issa A.D. Nesnas, van de afdeling robotica en mobiliteit van JPL. “Omdat Axel relatief weinig massa heeft, kan een missie ook een aantal Axel-rovers vervoeren. Dat zou ons de mogelijkheid geven om agressiever te zijn met het terrein dat we zouden verkennen, terwijl het algemene risico beheersbaar zou blijven. ”
Nesnas zei dat Axel als een jojo is - hij zit op een ketting die aan een grotere rover is bevestigd en kan langs de zijkanten van kraters, ravijnen en geulen op en neer gaan, en regio's verkennen die niet veilig zijn voor andere rovers.

Het eenvoudige en elegante ontwerp van Axel, dat zowel ondersteboven als met de goede kant naar boven kan werken, gebruikt slechts drie motoren: één om elk van de twee wielen te bedienen en een derde om een hendel te bedienen. De hendel bevat een schep om maan- of planetair materiaal te verzamelen voor wetenschappers om te bestuderen, en het past ook de twee stereocamera's van de robot aan, die 360 graden kunnen kantelen.

Axel's cilindrische behuizing heeft reken- en draadloze communicatiemogelijkheden en een traagheidssensor om autonoom te werken. Het heeft ook een ketting die Axel kan afrollen om af te dalen van een grotere lander, rover of ankerpunt. De rover kan verschillende wieltypen gebruiken, van grote vouwbare wielen tot opblaasbare wielen, die de rover helpen een harde landing te tolereren en rotsachtig terrein te hanteren.
Axel is in ontwikkeling sinds 1999 en studenten van Caltech, Purdue University en Arkansas Tech University hebben in de loop der jaren samengewerkt met JPL om deze veelzijdige rover te ontwikkelen.
Voor meer informatie over Axel, zie JPL's Axel-pagina en Caltech's Axel-website.